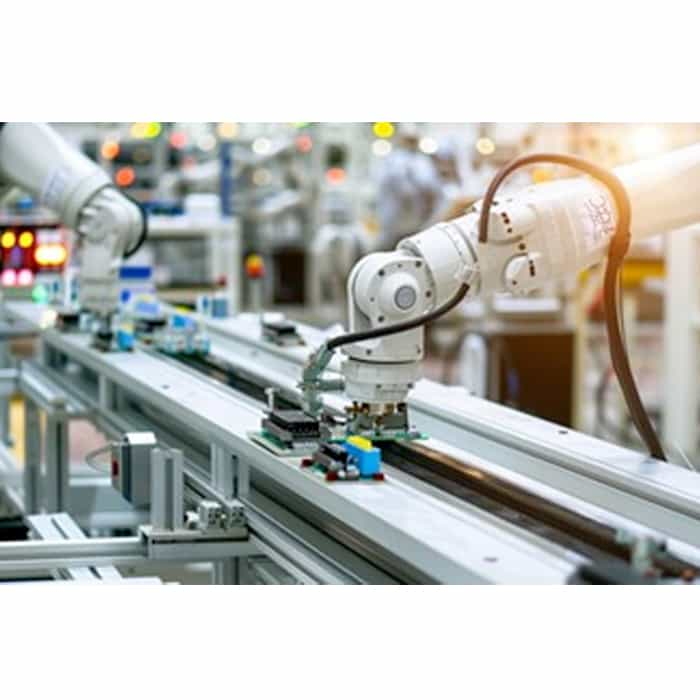
Servo & Robotics Test System
Advanced Validation for Precision Motion & Automation
The HAWKSTEIN Servo & Robotics Test System is a cutting-edge diagnostic and validation platform built to ensure the highest levels of accuracy, torque consistency, and operational longevity for robotic joints and servo-controlled mechanisms. From high-speed pick-and-place arms to precision medical robotics, this system provides the data-driven confidence required for mission-critical deployment.


















{kind=link}